通过Shared Memory加速矩阵乘(Double等类型)分析
64位数据矩阵乘优化访存分析 {#sector_1}
通过分析下面的代码,回答对应的两个问题(答案在文章结尾给出)。
🌰:
#define BLOCK_SIZE 16 // 定义块大小为16
#define MATRIX_DIM 256 // 定义矩阵维度为256
// 定义线程块和网格的尺寸
dim3 Block_dim(BLOCK_SIZE, BLOCK_SIZE);
dim3 Grid_dim(MATRIX_DIM / BLOCK_SIZE, MATRIX_DIM / BLOCK_SIZE);
// 启动核函数进行矩阵乘法运算
multiply <<< Grid_dim, Block_dim >>> (A_mat_d, B_mat_d, C_mat_d);
// 核函数,用于执行矩阵乘法
__global__ void multiply(const double * __restrict__ A_mat, const double * __restrict__ B_mat, double * __restrict__ C_mat)
{
int i, j;
double temp = 0;
// 定义共享内存,用于存储块内的子矩阵
__shared__ double A_shared[BLOCK_SIZE][BLOCK_SIZE];
__shared__ double B_shared[BLOCK_SIZE][BLOCK_SIZE];
// 计算当前线程对应的全局行和列索引
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
// 循环遍历每个子矩阵块
for (int tileNUM = 0; tileNUM < MATRIX_DIM / BLOCK_SIZE; tileNUM++)
{
// 计算子矩阵块内的索引
j = tileNUM * BLOCK_SIZE + threadIdx.x;
i = tileNUM * BLOCK_SIZE + threadIdx.y;
// 将子矩阵块的数据加载到共享内存中
A_shared[threadIdx.y][threadIdx.x] = A_mat[row * MATRIX_DIM + j];
B_shared[threadIdx.y][threadIdx.x] = B_mat[i * MATRIX_DIM + col];
__syncthreads(); // 同步,确保所有线程都完成加载
// 进行子矩阵块的乘法运算
for (int k = 0; k < BLOCK_SIZE; k++)
{
temp += A_shared[threadIdx.y][k] * B_shared[k][threadIdx.x];
}
__syncthreads(); // 再次同步,确保所有线程都完成计算
}
// 将计算结果写入全局内存
C_mat[row * MATRIX_DIM + col] = temp;
}根据代码提示分析描述,请说明
- (1) 对于线程块block(1,1),在tileNum是1上,代码26行执行完成的情况下,请说明,A_shared和B_shared分别保存了A_mat和B_mat的哪些数据,以及这些数据在Shared Memory中的内存布局。A_mat和B_mat中的数据以相对于起始位置的偏移表示,即类似代码中A_mat[row * MATRIX_DIM + j]的形式。
- (2) 对于第30行代码
temp += A_shared[threadIdx.y][k] * B_shared[k][threadIdx.x];,A_shared和B_shared访问shared memory是否导致bank conflicts,请分析说明。
关于上述问题的推荐阅读:
在做算子优化的时候(比如 GEMM),我们需要充分利用 shared memory 的 broadcast 机制,以及避免 bank conflicts 的出现。同时还会用 LDS.64 或 LDS.128 指令 (局部数据共享指令/ 汇编级)(也可以直接用 float2、float4)等一次访问 8 或 16 个 bytes。但在官方文档中,只介绍了每个 thread 访问 4 byte(即 32bit)时的 broadcast 机制和 bank conflict 情形。
对于每个线程访问一个数据的情况:
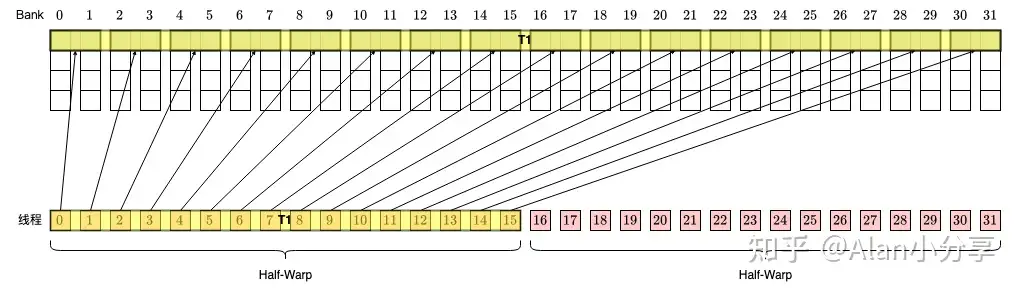
- 对于常规访存指令(32bits/4Bytes)的情况,每个word在 i % 32 bank上,每个 bank 在每个 cycle 的 bandwidth 为 32 bits(4 Bytes),所以 shared memory 在每个 cycle 的 bandwidth 为 32 * 32 bits = 32 * 4 bytes = 128 bytes。
- 对于LSD.64(即每次取8Bytes数据)的访存指令,16个线程即可取得128 Bytes数据。这时CUDA 会默认将一个 warp 拆分为两个 half warp,每个 half warp 产生一次 memory transaction。即一共两次 transaction。
只有以下两个条件之一满足时,这两个 half warp 的访问才会合并成一次 memory transaction:
- 对于 Warp 内所有活跃的第 i 号线程,第 i xor 1 号线程不活跃或者访存地址和其一致;(i.e. T0==T1, T2==T3, T4==T5, T6==T7, T8 == T9, ......, T30 == T31, etc.)
- 对于 Warp 内所有活跃的第 i 号线程,第 i xor 2 号线程不活跃或者访存地址和其一致;(i.e. T0==T2, T1==T3, T4==T6, T5==T7 etc.)
(活跃是指有访存需求)
简单理解一下,当上面两种情况发生时,硬件就可以判断(具体是硬件还是编译器的功劳,我也不确定,先归给硬件吧),单个 half warp 内,最多需要 64 bytes 的数据,那么两个 half warp 就可以合并起来,通过一次 memory transaction,拿回 128 bytes 的数据。然后线程之间怎么分都可以(broadcast 机制). 当然,这里的前提是没有产生 bank conflict。即没有从单个 bank 请求超过 1 个 word。
情形一
其实 bank conflict 是针对单次 memory transaction 而言的。如果单次 memory transaction 需要访问的 128 bytes 中有多个 word 属于同一个 bank,就产生了 bank conflict,从而需要拆分为多次 transaction。比如这里,第一次访问了 0 - 31 个 word,第二次访问了 32 - 63 个 word,每次 transaction 内部并没有 bank conflict。
这里也可以查看从矩阵转置看共享内存(CUDA)
对于128 位访存情况同理:
使用 LDS.128 指令(或者通过 float4、uint4 等类型)取数据时,每个 thread 请求 128 bits(即 16 bytes)数据,那么每 8 个 thread 就需要请求 128 bytes 的数据。
所以,CUDA 会默认把每个 half warp 进一步切分成两个 quarter warp,每个包含 8 个 thread。每个 quarter warp 产生一次 memory transaction。所以每个 warp 每次请求,默认会有 4 次 memory transaction。(没有 bank conflict 的情况下)。类似 64 位宽的情况,当满足特定条件时,一个 half warp 内的两个 quarter warp 的访存请求会合并为 1 次 memory transaction。但是两个 half warp 不会再进一步合并了。
具体条件和 64 位宽一样:
- 对于 Warp 内所有活跃的第 i 号线程,第 i xor 1 号线程不活跃或者访存地址和其一致;(i.e. T0==T1, T2==T3, T4==T5, T6==T7, T8 == T9, ......, T30 == T31, etc.)
- 对于 Warp 内所有活跃的第 i 号线程,第 i xor 2 号线程不活跃或者访存地址和其一致;(i.e. T0==T2, T1==T3, T4==T6, T5==T7 etc.) (活跃是指有访存需求)
对于LDS.64, LDS.128数据的Bank Conflict更详细内容请见Reference_1.
Note
- LDS.64:代表从局部数据共享中读取或写入 64 位(8 字节)的数据。
LDS.128:代表从局部数据共享中读取或写入 128 位(16 字节)的数据。 - float2:表示包含两个 32 位浮点数的向量。例如,一个二维坐标 (x, y) 可以用 float2 来表示。
float4:表示包含四个 32 位浮点数的向量。例如,一个四维向量 (x, y, z, w) 或颜色值 (r, g, b, a) 可以用 float4 来表示。
矩阵乘法的 CUDA 优化 {#sector_2}
以单精度为例
矩阵乘
CPU 下的矩阵乘:
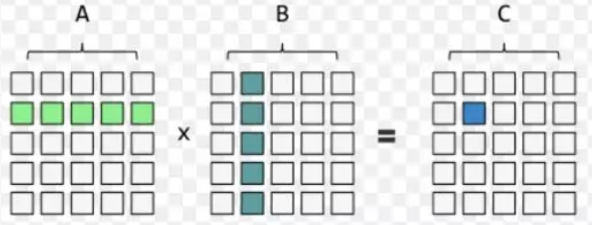
$A_{m \times k} \cdot B_{k \times n} = C_{m \times n}$
void matrixMulCpu(float* fpMatrixA, float* fpMatrixB, float* fpMatrixC,
int m, int n, int k)
{
float sum = 0.0f;
for(int i = 0; i < m; i++)
{
for(int j = 0; j < n; j++)
{
for(int l = 0; l < k; l++)
{
sum += fpMatrixA[i * k + l] * fpMatrixB[l * n + j];
}
fpMatrixC[i * n + j] = sum;
sum = 0.0f;
}
}
}上述 CPU 实现的代码中使用三层循环进行矩阵乘的计算,实际计算数达到了 $m \times n \times k$, 时间复杂度为 $O(N^3)$.
GPU Native GEMM:
__global__ void matrixMul(const float *A, const float *B, float *C,
int M, int N, int K) {
int tx = blockIdx.x * blockDim.x + threadIdx.x;
int ty = blockIdx.y * blockDim.y + threadIdx.y;
if(ty < M && tx < N) {
float c = 0;
for(int i = 0; i < K; ++i){
c += A[ty * K + i] * B[i * N + tx];
}
C[ty * N + tx] = c;
}
}在上述GPU Native代码中,矩阵A需要被重复加载 $k$ 次,矩阵B需要被重复加载 $m$ 次,在不考虑全局内存访存合并的情况下,矩阵中的每个元素都需要被重复加载 $m \times n \times k$次。加之全局内存访问延迟为几百 cycles,导致 GEMM 性能很低,计算/访存比极小。于是考虑利用共享内存低延迟、高带宽的特点,对矩阵乘进行分块处理。
共享内存优化矩阵乘
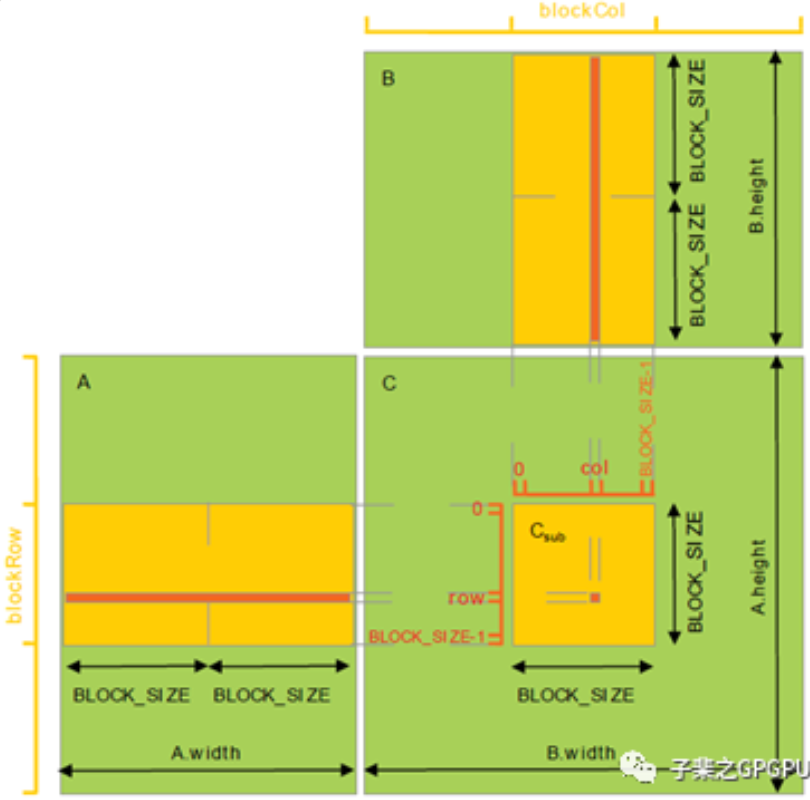
矩阵分块乘
// 矩阵分块乘
__global__ void matrixMultiplySharedKernel(float* matrixA, float* matrixB, float* matrixC, int rowsA, int colsB, int commonDim) {
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
float value = 0.0f;
// 矩阵A和B的共享内存块
__shared__ float tileA[TILE_SIZE][TILE_SIZE];
__shared__ float tileB[TILE_SIZE][TILE_SIZE];
// 矩阵分块的数量
int numTiles = (commonDim + TILE_SIZE - 1) / TILE_SIZE;
for(int t = 0; t < numTiles; t++) {
// 将全局内存中的矩阵分块至共享内存中
if(row < rowsA && t * TILE_SIZE + threadIdx.x < commonDim)
tileA[threadIdx.y][threadIdx.x] = matrixA[row * commonDim + t * TILE_SIZE + threadIdx.x];
else
tileA[threadIdx.y][threadIdx.x] = 0.0f;
if(t * TILE_SIZE + threadIdx.y < commonDim && col < colsB)
tileB[threadIdx.y][threadIdx.x] = matrixB[(t * TILE_SIZE + threadIdx.y) * colsB + col];
else
tileB[threadIdx.y][threadIdx.x] = 0.0f;
__syncthreads();
// 每个线程计算block块中的乘积并累加
for(int i = 0; i < TILE_SIZE; i++) {
value += tileA[threadIdx.y][i] * tileB[i][threadIdx.x];
}
__syncthreads();
}
if(row < rowsA && col < colsB) {
matrixC[row * colsB + col] = value;
}
}对矩阵乘进行分块处理,每个Block 计算一个子矩阵,通过对子矩阵向 numTiles 方向(矩阵A向行方向,矩阵B向列方向)进行迭代,计算矩阵C中每个元素的值。
寄存器优化矩阵乘(提高计算⬆️/访存比)
// 使用指令级并行(ILP)2来提高性能
__global__ void matrixMultiplySharedILPkernel(float* matrixA, float* matrixB,
float* matrixC, int rowsA, int colsB, int commonDim)
{
int row = blockIdx.y * blockDim.y * 2 + threadIdx.y; // 每个线程块处理两个块
int col = blockIdx.x * blockDim.x + threadIdx.x; // 列索引
float value[2] = {0.0f}; // 用于存储两个结果值
__shared__ float tileA[BLOCK_SIZE][BLOCK_SIZE]; // 共享内存中的子矩阵A
__shared__ float tileB[BLOCK_SIZE][BLOCK_SIZE]; // 共享内存中的子矩阵B
int numTiles = (commonDim + BLOCK_SIZE - 1) / BLOCK_SIZE; // 计算需要处理的子矩阵块数
for(int t = 0; t < numTiles; t++)
{
// 从全局内存加载数据到共享内存
tileA[threadIdx.y][threadIdx.x] = matrixA[row * commonDim + t * BLOCK_SIZE + threadIdx.x];
tileA[threadIdx.y + 16][threadIdx.x] = matrixA[(row + 16) * commonDim + t * BLOCK_SIZE + threadIdx.x];
tileB[threadIdx.y][threadIdx.x] = matrixB[(t * BLOCK_SIZE + threadIdx.y) * colsB + col];
tileB[threadIdx.y + 16][threadIdx.x] = matrixB[(t * BLOCK_SIZE + threadIdx.y + 16) * colsB + col];
__syncthreads(); // 确保所有线程都完成加载
// 子矩阵乘法
for(int j = 0; j < BLOCK_SIZE; j++)
{
value[0] += tileA[threadIdx.y][j] * tileB[j][threadIdx.x];
value[1] += tileA[threadIdx.y + 16][j] * tileB[j][threadIdx.x];
}
__syncthreads(); // 确保所有线程都完成计算
}
// 将计算结果写入全局内存
matrixC[row * colsB + col] = value[0];
matrixC[(row + 16) * colsB + col] = value[1];
}注意, kernel launch 时的 blocksize 需要变化为: blockSize.y = BLOCK_SIZE / 2。而 gridSize 不变.
事实上,上述程序对计算/访存比的提高并不明显,要显著提高程序运行效率可以采用向量化访存指令。
float c[4][4] = {{0}};
float a_reg[4];
float b_reg[4];
for(int i = 0; i < K; i += TILE_K){
__syncthreads();
// transfer tile from global mem to shared mem
load_gmem_tile_to_smem(A, i, smemA);
load_gmem_tile_to_smem(B, i, smemB);
__syncthreads();
#pragma unroll
for(int j = 0; j < TILE_K; ++j) {
// load tile from shared mem to register
load_smem_tile_to_reg(smemA, j, a_reg);
load_smem_tile_to_reg(smemB, j, b_reg);
// compute matrix multiply accumulate 4x4
mma4x4(a_reg, b_reg, c);
}
}上述伪代码程序中每次访存向量化达到提高计算/访存比的效果。
矩阵分块乘策略
考虑一个 block 计算 128x128 的分块,若每个线程计算 128 个结果,需要的 block size 为 128,单个线程需要 128 个寄存器储存计算结果,加上所需的 Gmem to Smem,Smem to Reg 等一些所需的寄存器,大概共需要至少 180 多个,计算 Occupany 可知此时的 Active Warp 数只有 8,Occupany 为 25%;若设置 block size 为 256,则每个线程仅需计算 64 个结果,调整寄存器和 Shared Memory 的使用量并观察 Occupany,可知若每个线程只使用 128 个寄存器,block 内的 Shared Memory 使用量限制在 32K,Active Warp 数可以达到 16,是一个更优的选择。
#define TILE_K 16
__shared__ float4 smemA[2][TILE_K * 128 / 4];
__shared__ float4 smemB[2][TILE_K * 128 / 4];
float4 c[8][2] = {{make_float4(0.f, 0.f, 0.f, 0.f)}};
float4 ldg_a_reg[2];
float4 ldg_b_reg[2];
float4 a_reg[2][2];
float4 b_reg[2][2];
// transfer first tile from global mem to shared mem
load_gmem_tile_to_reg(A, 0, ldg_a_reg);
load_gmem_tile_to_reg(B, 0, ldg_b_reg);
store_reg_to_smem_tile_transpose(ldg_a_reg, 0, smemA[0]);
store_reg_to_smem_tile(ldg_b_reg, 0, smemB[0]);
__syncthreads();
// load first tile from shared mem to register
load_smem_tile_to_reg(smemA[0], 0, a_reg[0]);
load_smem_tile_to_reg(smemB[0], 0, b_reg[0]);
int write_stage_idx = 1; //ping pong switch
do {
i += TILE_K;
// load next tile from global mem
load_gmem_tile_to_reg(A, i, ldg_a_reg);
load_gmem_tile_to_reg(B, i, ldg_b_reg);
int load_stage_idx = write_stage_idx ^ 1;
#pragma unroll
for(int j = 0; j < TILE_K - 1; ++j) {
// load next tile from shared mem to register
load_smem_tile_to_reg(smemA[load_stage_idx], j + 1, a_reg[(j + 1) % 2]);
load_smem_tile_to_reg(smemB[load_stage_idx], j + 1, b_reg[(j + 1) % 2]);
// compute matrix multiply accumulate 8x8
mma8x8(a_reg[j % 2], b_reg[j % 2], c);
}
if(i < K) {
// store next tile to shared mem
store_reg_to_smem_tile_transpose(ldg_a_reg, 0, smemA[write_stage_idx]);
store_reg_to_smem_tile(ldg_b_reg, 0, smemB[write_stage_idx]);
// use double buffer, only need one sync
__syncthreads();
// switch
write_stage_idx ^= 1;
}
// load first tile from shared mem to register of next iter
load_smem_tile_to_reg(smemA[load_stage_idx ^ 1], 0, a_reg[0]);
load_smem_tile_to_reg(smemB[load_stage_idx ^ 1], 0, b_reg[0]);
// compute last tile mma 8x8
mma8x8(a_reg[1], b_reg[1], c);
} while (i < K);
store_c(c, C)这段伪代码实现了一个矩阵乘法的CUDA核函数,其中使用了共享内存和寄存器来优化数据访问速度,采用双缓冲机制来提高计算效率。下面是对这段代码的逐步中文解析:
变量定义和初始化
- 宏定义:
TILE_K定义为16,这表示每个 tile 的大小为 16。 - 共享内存:
smemA和smemB是两个二维共享内存数组,每个数组有两个缓冲区,每个缓冲区大小为TILE_K * 128 / 4。
- 寄存器:
c是用于存储结果的寄存器数组,初始化为全零。ldg_a_reg和ldg_b_reg是用于从全局内存加载数据到寄存器的临时寄存器数组。a_reg和b_reg是用于从共享内存加载数据到寄存器的临时寄存器数组。
初始化阶段
-
从全局内存加载第一块数据到寄存器:
load_gmem_tile_to_reg函数从全局内存中加载数据到ldg_a_reg和ldg_b_reg。
-
将寄存器数据存储到共享内存:
store_reg_to_smem_tile_transpose将ldg_a_reg的数据转置后存储到共享内存smemA[0]中。store_reg_to_smem_tile将ldg_b_reg的数据存储到共享内存smemB[0]中。
-
同步线程:
__syncthreads()用于确保所有线程都完成了对共享内存的写入。
-
从共享内存加载数据到寄存器:
load_smem_tile_to_reg将共享内存smemA[0]和smemB[0]中的数据加载到寄存器a_reg[0]和b_reg[0]。
计算阶段
-
初始化双缓冲开关:
write_stage_idx设置为 1。 -
主计算循环:使用
do-while循环来遍历整个 K 维度。- 更新全局内存指针:
i += TILE_K。 - 加载下一块数据到寄存器:从全局内存中加载下一块数据到
ldg_a_reg和ldg_b_reg。
- 更新全局内存指针:
-
计算循环:使用
#pragma unroll展开内部循环,加速计算。- 从共享内存加载下一块数据到寄存器:每次从共享内存加载下一行 tile 数据到寄存器
a_reg[(j + 1) % 2]和b_reg[(j + 1) % 2]。 - 矩阵乘法累积计算:调用
mma8x8函数进行 8x8 的矩阵乘法累积。
- 从共享内存加载下一块数据到寄存器:每次从共享内存加载下一行 tile 数据到寄存器
-
如果没有到达最后一块数据:
- 将寄存器数据存储到共享内存:
store_reg_to_smem_tile_transpose将ldg_a_reg的数据转置后存储到共享内存smemA[write_stage_idx]中。store_reg_to_smem_tile将ldg_b_reg的数据存储到共享内存smemB[write_stage_idx]中。
- 同步线程:确保所有线程完成对共享内存的写入。
- 切换双缓冲区:
write_stage_idx ^= 1。
- 将寄存器数据存储到共享内存:
-
加载下一次迭代的第一块数据:
- 从共享内存加载数据到寄存器:从共享内存
smemA[load_stage_idx ^ 1]和smemB[load_stage_idx ^ 1]加载数据到a_reg[0]和b_reg[0]。
- 从共享内存加载数据到寄存器:从共享内存
-
计算最后一块数据:调用
mma8x8函数进行最后一块数据的矩阵乘法累积。
存储结果
- 将计算结果存储到全局内存:
store_c函数将寄存器c中的计算结果存储到全局内存C中。
这段代码通过使用共享内存和寄存器进行双缓冲数据传输,实现了高效的矩阵乘法计算。这样可以在一次迭代中完成数据的加载、计算和存储操作,有效地提高了计算效率。
此外,还可以利用 CUDA 9 的warp-level指令以及Tensor Core进行 GEMM 的优化:
利用Tensor Core进行GEMM优化
__global__ void tensorCoreMatrixMul(float* A, float* B, float* C, int M, int N, int K) {
#if __CUDA_ARCH__ >= 700
// 适用于 Tensor Cores 的数据类型必须是 half
half* A_half = reinterpret_cast<half*>(A);
half* B_half = reinterpret_cast<half*>(B);
half* C_half = reinterpret_cast<half*>(C);
int warpM = threadIdx.y / 8;
int warpN = threadIdx.x / 8;
int laneM = threadIdx.y % 8;
int laneN = threadIdx.x % 8;
wmma::fragment<wmma::matrix_a, 16, 16, 16, half, wmma::row_major> a_frag;
wmma::fragment<wmma::matrix_b, 16, 16, 16, half, wmma::col_major> b_frag;
wmma::fragment<wmma::accumulator, 16, 16, 16, float> c_frag;
wmma::fill_fragment(c_frag, 0.0f);
for (int i = 0; i < K; i += 16) {
int aRow = warpM * 16;
int bCol = warpN * 16;
wmma::load_matrix_sync(a_frag, A_half + aRow * K + i, K);
wmma::load_matrix_sync(b_frag, B_half + i * N + bCol, N);
wmma::mma_sync(c_frag, a_frag, b_frag, c_frag);
}
int cRow = warpM * 16;
int cCol = warpN * 16;
wmma::store_matrix_sync(C_half + cRow * N + cCol, c_frag, N, wmma::mem_row_major);
#endif
}文章开头问题答案:
-
直接计算即可;
-
A_shared和B_shared访问shared memory都不会导致bank conflicts:A_shared会触发广播机制,而B_shared则实现了连续访问。
[!IMPORTANT]
注意这里很难理解的一点,在(double)float32类型中,实际上是将16 个threads 作为half warp的。也就是说每一行32 个bank对应的就是16 个线程,此时对应矩阵乘来说,temp += A_shared[threadIdx.y][k] * B_shared[k][threadIdx.x]; 每次k 的迭代中对于A_shared共享内存都进行了广播,而对于B_shared共享内存则是连续访问,都没有bank conflict.
REFERENCE:THANKS FOR
1. 搞懂 CUDA Shared Memory 上的 bank conflicts 和向量化指令(LDS.128 / float4)的访存特点